Welcome to Shenzhen Weihua Development Co., Ltd
语言选择:  ∷
∷ 
∷ ∷ 






功能描述:
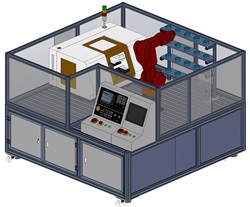
本区域配合《工业机器人夹具设计与应用》课程进行实训教学,根据任务要求开发配置不同任务载体,培养学生对机器人末端执行器的认识,工作台采用模块化设计,具备独立性、兼容性、可移动性等特点,并可根据客户需求进行持续开发升级。
主要设备清单:
序号 | 类型 | 模块内容 | 单位 | 数量 |
1 | 夹具测试及应用工作站 | 气动实验台 | 套 | 8 |
2 | 三轴机器人 | 套 | 8 | |
3 | plc控制模块 | 台 | 8 | |
4 | 气缸外夹式夹具 | 套 | 8 | |
5 | 真空吸盘式夹具 | 套 | 8 | |
6 | 焊接专用式夹具 | 套 | 8 | |
7 | 数字化课程包 | 《工业机器人夹具设计与应用》 | 套 | 1 |
8 | 信息化设备 | 70#智能教学终端 | 台 | 1 |
9 | 文化建设 | 功能区文化(挂图、标牌、文化写真、玻璃贴纸、造型等) | 套 | 1 |

功能描述:
视觉检测技术是精密测试技术领域内最具有发展潜力的新技术,广泛应用于食品、日化等生产加工领域,在现代制造业中应用前景广阔。本区域支持《机器视觉技术》课程实施。可实现功能包括包装盒检测、印刷编码查错、工件尺寸检测等。
主要设备清单:
序号 | 类型 | 模块内容 | 单位 | 数量 |
1 | 机器视觉及调试应用工作站 | Venus智能相机套件 | 套 | 8 |
2 | 智能相机配套算法 | 套 | 8 | |
3 | 结构件材料 | 台 | 8 | |
4 | 其他外围设备 | 套 | 8 | |
5 | 数字化课程包 | 《机器视觉技术》 | 套 | 1 |
6 | 信息化设备 | 70#智能教学终端 | 台 | 1 |
7 | 文化建设 | 功能区文化(挂图、标牌、文化写真、玻璃贴纸、造型等) | 套 | 1 |
功能描述:
工业机器人机械、电气部件的拆装及维护是工业机器人日常应用中较常见的工作,本工作站选取工业级小型机器人,将各零部件进行模块化设计,配置装配调试工作台,配备详细的教学说明,支持《机器人维护保养》课程实训。
主要设备清单:
序号 | 类型 | 模块内容 | 单位 | 数量 |
1 | 机器人拆装维护工作站 | 机器人机器人本体 | 套 | 4 |
2 | 控制柜 | 套 | 4 | |
3 | 示教器 | 台 | 4 | |
4 | 手动油泵 | 套 | 4 | |
5 | 工件放置台 | 套 | 4 | |
6 | 移动式工具箱 | 套 | 4 | |
7 | 零件摆放盒 | 套 | 4 | |
8 | 拆装台 | 套 | 4 | |
9 | 拆装工具包 | 套 | 4 | |
10 | 数字化课程包 | 《工业机器人维护与保养》 | 套 | 1 |
11 | 虚拟仿真软件 | 工业机器人虚拟结构原理展示台 | 套 | 1 |
11 | 信息化设备 | 70#智能一体机 | 台 | 1 |
12 | 文化建设 | 功能区文化(挂图、标牌、文化写真、玻璃贴纸、造型等) | 套 | 1 |

功能描述:
工业机器人机械、电气部件的拆装及维护是工业机器人日常应用中较常见的工作,本工作站选取工业级小型机器人,将各零部件进行模块化设计,配置装配调试工作台,配备详细的教学说明,支持《机器人维护保养》课程实训。
虚拟仿真实训室
功能描述:
虚拟仿真实训室用于机器人离线编程教学,支持多机器人协同工作和基于三维扫描数据的路径规划离线编程,支持机器人控制器虚拟机与PLC的仿真模拟,可对大型自动化生产线和无人智慧工厂进行虚拟联调和陪产。可通过离线编程,满足一对多大规模教学。

功能描述:
虚拟仿真实训室用于机器人离线编程教学,支持多机器人协同工作和基于三维扫描数据的路径规划离线编程,支持机器人控制器虚拟机与PLC的仿真模拟,可对大型自动化生产线和无人智慧工厂进行虚拟联调和陪产。可通过离线编程,满足一对多大规模教学。
主要设备清单:
序号 | 类型 | 模块内容 | 单位 | 数量 |
1 | 仿真实训软件 | 工业机器人离线编程软件 | 套 | 49 |
2 | 工业机器人典型应用实训软件 | 套 | 1 | |
3 | 信息化设备 | 70#智能一体机 | 台 | 1 |
4 | 学生电脑 | 台 | 48 | |
5 | 文化建设 | 功能区文化(挂图、标牌、文化写真、玻璃贴纸、造型等) | 套 | 1 |
地址:深圳市光明新区公明街道上村上辇第三工业园区 粤ICP备2021166738号 XML地图 网站模板