Welcome to Shenzhen Weihua Development Co., Ltd
语言选择:  ∷
∷ 
∷ ∷ 
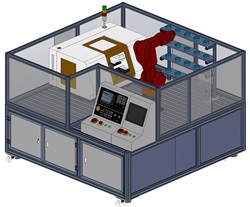
焊机器人CRH-1500-B-6
功能特点
其机和机械手上有 一个 50 mm 宽的通孔,可以保护机械臂上的整套保护气体软管的敷设。
技能应用
可以避免保护气体软管组件受到机械性损伤, 而且可以防止其在机器人改变方向时随意甩动。
程序简化
提高了构件的可接近性及保证了对整套软管的※佳保护,而且还意味着离线编程也得到了简化。用于点焊自动作业的工业机器人。是由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成。点焊机器人一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。点焊机器人的驱动方式有液压驱动和电气驱动两种。同时液压点焊机器人各关节的运动是靠液压油缸驱动的,电动点焊机器人是用直流伺服电机驱动或交流伺服电机驱动的。因此,点焊机器人多数是电动,并且对于不同生产要求及产品的改型换代具有很大的柔性和适应性。在点焊焊接系统中包括点焊焊机和点焊焊钳两部分,而且机器人本体和点焊焊接系统在计算机的控制下构成了点焊机器人系统。 点焊机器人目前广泛使用在汽车制造、电子、模具、机械等各个部门
点焊机器人目前广泛使用在汽车制造、电子、模具、机械等各个部门
地址:深圳市光明新区公明街道上村上辇第三工业园区 粤ICP备2021166738号 XML地图 网站模板